WebSites
Projekte
CCD_ControllerCommandDispatcher
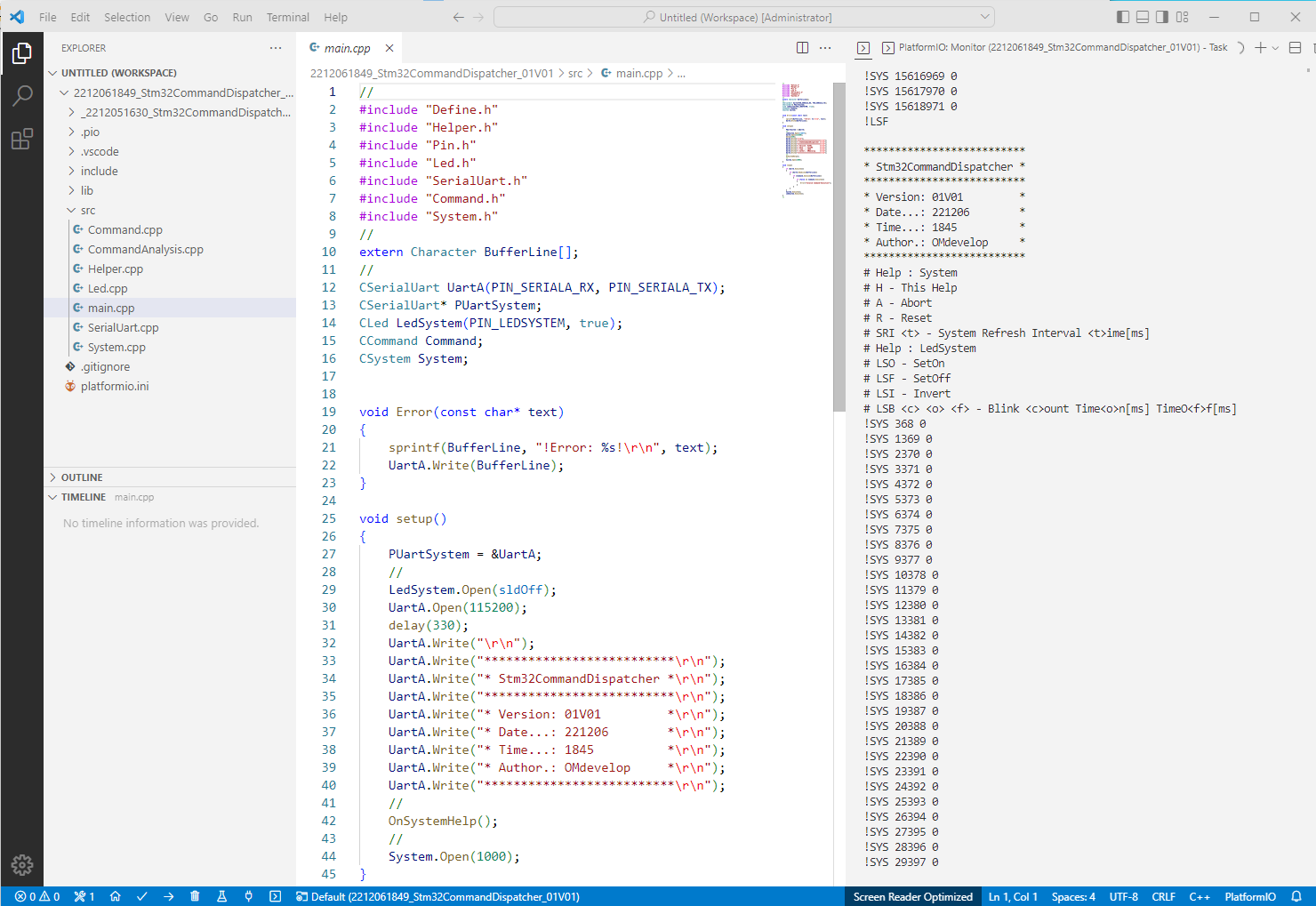
• STM32F103CommandDispatcher unter der VSCode-Entwicklungsoberfläche
• Code für MicroController STM32F103C8T6 (BluePill)
• Analyse / Response und Ausführung von UART-ASCII-Commands
• Senden von System-Events zum PC-Client
• Minimale Version: nur Berücksichtigung von System- und Led-Commands
• main.cpp :
STM32F103-CommandDispatcher
Übersicht
• STM32F103CommandDispatcher unter der VSCode-Entwicklungsoberfläche
• Code für MicroController STM32F103C8T6 (BluePill)
• Analyse / Response und Ausführung von UART-ASCII-Commands
• Senden von System-Events zum PC-Client
• Minimale Version: nur Berücksichtigung von System- und Led-Commands
Download
• 2212261851_Stm32CommandDispatcher_01V05.zipBestandteile
• main.cpp :
//
#include "Define.h"
#include "Helper.h"
#include "Pin.h"
#include "Led.h"
#include "SerialUart.h"
#include "Command.h"
#include "System.h"
//
extern Character BufferLine[];
//
CSerialUart UartA(PIN_SERIALA_RX, PIN_SERIALA_TX);
CSerialUart* PUartSystem;
CLed LedSystem(PIN_LEDSYSTEM, true);
CCommand Command;
CSystem System;
void Error(const char* text)
{
sprintf(BufferLine, "!Error: %s!\r\n", text);
UartA.Write(BufferLine);
}
void setup()
{
PUartSystem = &UartA;
//
LedSystem.Open(sldOff);
UartA.Open(115200);
delay(330);
UartA.Write("\r\n");
UartA.Write("**************************\r\n");
UartA.Write("* Stm32CommandDispatcher *\r\n");
UartA.Write("**************************\r\n");
UartA.Write("* Version: 01V01 *\r\n");
UartA.Write("* Date...: 221206 *\r\n");
UartA.Write("* Time...: 1845 *\r\n");
UartA.Write("* Author.: OMdevelop *\r\n");
UartA.Write("**************************\r\n");
//
OnSystemHelp();
//
System.Open(1000);
}
void loop()
{
if (UartA.Execute())
{
if (UartA.ReadLine(BufferLine))
{
if (Command.Analyse(BufferLine))
{
if (false == Command.Execute())
{
Error("Invalid Command-Execution");
}
}
}
}
System.Execute();
LedSystem.Execute();
}
//
• Command.cpp :
//
#include "Define.h"
#include "Helper.h"
#include "Pin.h"
#include "Led.h"
#include "SerialUart.h"
#include "Command.h"
//
extern Character BufferLine[];
extern CSerialUart UartA;
extern CLed LedSystem;
extern CCommand Command;
//
CCommand::CCommand(void)
{
FCommand[0] = 0x00;
FParameterCount = 0;
FParameterA[0] = 0x00;
FParameterB[0] = 0x00;
FParameterC[0] = 0x00;
FParameterD[0] = 0x00;
}
//
char* CCommand::GetCommand(void)
{
return FCommand;
}
byte CCommand::GetParameterCount(void)
{
return FParameterCount;
}
char* CCommand::GetParameterA(void)
{
return FParameterA;
}
char* CCommand::GetParameterB(void)
{
return FParameterB;
}
char* CCommand::GetParameterC(void)
{
return FParameterC;
}
char* CCommand::GetParameterD(void)
{
return FParameterD;
}
//
Boolean CCommand::Analyse(char* pline)
{
const char* TOKEN_RXD = " \r\n\t";
char* Token;
FCommand[0] = 0x00;
FParameterCount = 0;
FParameterA[0] = 0x00;
FParameterB[0] = 0x00;
FParameterC[0] = 0x00;
FParameterD[0] = 0x00;
Token = strtok(pline, TOKEN_RXD);
if (NULL != Token)
{
strcpy(FCommand, Token);
strupr(FCommand);
FParameterCount = 0;
Token = strtok(NULL, TOKEN_RXD);
if (NULL != Token)
{
strcpy(FParameterA, Token);
FParameterCount = 1;
Token = strtok(NULL, TOKEN_RXD);
if (NULL != Token)
{
strcpy(FParameterB, Token);
FParameterCount = 2;
Token = strtok(NULL, TOKEN_RXD);
if (NULL != Token)
{
strcpy(FParameterC, Token);
FParameterCount = 3;
Token = strtok(NULL, TOKEN_RXD);
if (NULL != Token)
{
strcpy(FParameterD, Token);
FParameterCount = 4;
}
}
}
}
}
return (0 < strlen(FCommand));
}
//--------------------------------
// System
//--------------------------------
Boolean CCommand::AnalyseSystemHelp(void)
{ // Parameter -
return OnSystemHelp(true);
}
Boolean CCommand::AnalyseSystemAbort(void)
{ // Parameter -
return OnSystemAbort();
}
Boolean CCommand::AnalyseSystemReset(void)
{ // Parameter -
return OnSystemReset();
}
Boolean CCommand::AnalyseSystemRefreshInterval(void)
{ // Parameter -
if (GetParameterCount() < 1)
return false;
UInt32 TI = atol(GetParameterA());
return OnSystemRefreshInterval(TI);
}
//--------------------------------
// LedSystem
//--------------------------------
Boolean CCommand::AnalyseLedSystemOn(void)
{ // Parameter -
return OnLedSystemOn();
}
Boolean CCommand::AnalyseLedSystemOff(void)
{ // Parameter -
return OnLedSystemOff();
}
Boolean CCommand::AnalyseLedSystemInvert(void)
{ // Parameter -
return OnLedSystemInvert();
}
Boolean CCommand::AnalyseLedSystemBlink(void)
{ // ParameterA:count ParameterB:ontime[ms] ParameterC:offtime[ms]
if (GetParameterCount() < 3)
return false;
UInt32 BC = atol(GetParameterA());
UInt32 TO = atol(GetParameterB());
UInt32 TF = atol(GetParameterC());
return OnLedSystemBlink(BC, TO, TF);
}
//
Boolean CCommand::Execute(void)
{ // []0..4
//--------------------------------
// System
//--------------------------------
if (0 == strcmp("H", FCommand))
{
return AnalyseSystemHelp();
}
if (0 == strcmp("A", FCommand))
{
return AnalyseSystemAbort();
}
if (0 == strcmp("R", FCommand))
{
return AnalyseSystemReset();
}
if (0 == strcmp("SRI", FCommand))
{
return AnalyseSystemRefreshInterval();
}
//--------------------------------
// LedSystem
//--------------------------------
if (0 == strcmp("LSO", FCommand))
{
return AnalyseLedSystemOn();
}
if (0 == strcmp("LSF", FCommand))
{
return AnalyseLedSystemOff();
}
if (0 == strcmp("LSI", FCommand))
{
return AnalyseLedSystemInvert();
}
if (0 == strcmp("LSB", FCommand))
{
return AnalyseLedSystemBlink();
}
return false;
}
//
• CommandAnalysis.cpp :
//
#include "Define.h"
#include "Helper.h"
#include "Pin.h"
#include "Led.h"
#include "SerialUart.h"
#include "Command.h"
#include "System.h"
//
extern Character BufferLine[];
//
extern CSerialUart UartA;
extern CLed LedSystem;
extern CCommand Command;
extern CSystem System;
//
//--------------------------------
// System
//--------------------------------
Boolean OnSystemHelp(bool response)
{
if (response)
{
Response("H");
}
UartA.WriteLine("# Help : System");
UartA.WriteLine("# H - This Help");
UartA.WriteLine("# A - Abort");
UartA.WriteLine("# R - Reset");
UartA.WriteLine("# SRI - System Refresh Interval ime[ms]");
UartA.WriteLine("# Help : LedSystem");
UartA.WriteLine("# LSO - SetOn");
UartA.WriteLine("# LSF - SetOff");
UartA.WriteLine("# LSI - Invert");
UartA.WriteLine("# LSB - Blink ount Timen[ms] TimeOf[ms]");
return true;
}
Boolean OnSystemAbort(void)
{
Response("A");
// abort all FSMs
LedSystem.Abort();
return true;
}
Boolean OnSystemReset(void)
{
Response("R");
delay(1000);
NVIC_SystemReset();
return true;
}
Boolean OnSystemRefreshInterval(UInt32 time)
{
sprintf(BufferLine, "SRI %lu", time);
Response(BufferLine);
System.SetRefreshInterval(time);
return true;
}
//--------------------------------
// LedSystem
//--------------------------------
Boolean OnLedSystemOn(void)
{
LedSystem.Set(sldOn);
Response("LSO");
return true;
}
Boolean OnLedSystemOff(void)
{
LedSystem.Set(sldOff);
Response("LSF");
return true;
}
Boolean OnLedSystemInvert(void)
{
LedSystem.Invert();
Response("LSI");
return true;
}
Boolean OnLedSystemBlink(UInt32 count, UInt32 timeon, UInt32 timeoff)
{
sprintf(BufferLine, "LSB %i %i %i", count, timeon, timeoff);
Response(BufferLine);
return LedSystem.Blink(count, timeon, timeoff);
}
• Led.cpp :
//
#include "Led.h"
//
#include "Define.h"
#include "Helper.h"
#include "SerialUart.h"
//
extern char LineBuffer[];
extern CSerialUart UartA;
CLed::CLed(int pin, bool inverted)
{
FState = sldOff;
FPin = pin;
FInverted = inverted;
FCount = 0;
FTimeOn = 1;
FTimeOff = 1;
FTicksPreset = millis();
}
//
void CLed::Open(EStateLed state)
{
pinMode(FPin, OUTPUT);
Set(state);
}
//
void CLed::Abort(void)
{
FCount = 0;
FTimeOn = 1;
FTimeOff = 1;
Set(sldOff);
}
//
void CLed::Set(EStateLed state)
{
FState = state;
if (FInverted)
{
if (sldOn == FState)
{
digitalWrite(FPin, LOW);
Event("LSO");
}
else
{
digitalWrite(FPin, HIGH);
Event("LSF");
}
}
else
{
if (sldOn == FState)
{
digitalWrite(FPin, HIGH);
Event("LSO");
}
else
{
digitalWrite(FPin, LOW);
Event("LSF");
}
}
}
//
EStateLed CLed::Get(void)
{
return FState;
}
//
EStateLed CLed::Invert(void)
{
if (sldOff == Get())
{
Set(sldOn);
}
else
{
Set(sldOff);
}
return Get();
}
//
Boolean CLed::Blink(UInt32 count, UInt32 timeon, UInt32 timeoff)
{
FCount = max((UInt32)1, count);
FTimeOn = timeon;
FTimeOff = timeoff;
FTicksPreset = millis();
Set(sldOn);
return true;
}
void CLed::Execute(void)
{
if (0 < FCount)
{
if ((sldOn == Get()) && (FTicksPreset + FTimeOn) <= millis())
{
Set(sldOff);
}
else
if ((sldOff == Get()) && (FTicksPreset + FTimeOn + FTimeOff) <= millis())
{
FTicksPreset = millis();
FCount--;
if (0 < FCount)
{
Set(sldOn);
}
}
}
}
• SerialUart.cpp :
//
#include "SerialUart.h"
//
CSerialUart::CSerialUart(int pinrxd, int pintxd)
{
FPinRxD = pinrxd;
FPinTxD = pintxd;
FPUart = new HardwareSerial(FPinRxD, FPinTxD);
FRxCharacter = 0x00;
FRxIndex = 0;
}
void CSerialUart::Open(int baudrate)
{
FPUart->begin(baudrate);
FRxIndex = 0;
}
//
void CSerialUart::WriteLine(void)
{
FPUart->print("\r\n");
}
void CSerialUart::WriteLine(const char* value)
{
FPUart->print(value);
FPUart->print("\r\n");
}
void CSerialUart::Write(const char* value)
{
sprintf(FTxBuffer, "%s", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(char* value)
{
sprintf(FTxBuffer, "%s", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(Int8 value)
{
sprintf(FTxBuffer, "%i", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(UInt8 value)
{
sprintf(FTxBuffer, "%u", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(Int16 value)
{
sprintf(FTxBuffer, "%i", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(UInt16 value)
{
sprintf(FTxBuffer, "%u", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(Int32 value)
{
sprintf(FTxBuffer, "%i", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(UInt32 value)
{
sprintf(FTxBuffer, "%u", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(Float32 value)
{
sprintf(FTxBuffer, "%.3f", value);
FPUart->print(FTxBuffer);
}
void CSerialUart::Write(Double64 value)
{
sprintf(FTxBuffer, "%.6f", value);
FPUart->print(FTxBuffer);
}
//
Boolean CSerialUart::ReadCharacter(Character &character)
{
character = FRxCharacter;
FRxCharacter = 0x00;
return true;
}
Boolean CSerialUart::ReadLine(PCharacter pcharacter)
{
strcpy(pcharacter, FRxBuffer);
FRxIndex = 0;
FRxBuffer[FRxIndex] = 0x00;
return (0 < strlen(pcharacter));
}
//
Boolean CSerialUart::Execute(void)
{
if (FPUart->available())
{
FRxCharacter = FPUart->read();
if ((TOKEN_CR == FRxCharacter) ||
(TOKEN_LF == FRxCharacter))
{
FRxBuffer[FRxIndex] = 0x00;
FRxIndex = 0;
return (0 < strlen(FRxBuffer));
}
else
{
FRxBuffer[FRxIndex] = FRxCharacter;
FRxIndex++;
FRxBuffer[FRxIndex] = 0x00;
}
}
return false;
}
• Helper.cpp :
//
#include "Define.h"
#include "Helper.h"
#include "SerialUart.h"
//
extern CSerialUart UartA;
//
char BufferLine[SIZE_BUFFERLINE];
void Response(const char* text)
{
UartA.Write(":");
UartA.Write(text);
UartA.Write("\r\n");
}
void Event(const char* text)
{
UartA.Write("!");
UartA.Write(text);
UartA.Write("\r\n");
}
• System.cpp :
//
#include "Define.h"
#include "Helper.h"
#include "Led.h"
#include "SerialUart.h"
#include "System.h"
//
extern Character BufferLine[];
extern CSerialUart* PUartSystem;
extern CLed LedSystem;
//
CSystem::CSystem(void)
{
FRefreshInterval = INIT_REFRESHINTERVAL;
}
void CSystem::Open(UInt32 interval)
{
FRefreshInterval = interval;
}
//
void CSystem::SetRefreshInterval(UInt32 time)
{
FRefreshInterval = time;
}
//
void CSystem::Execute(void)
{
if (FTicksPreset < millis())
{
FTicksPreset = millis() + FRefreshInterval;
sprintf(BufferLine, "!SYS %lu %u", millis(), (int)LedSystem.Get());
PUartSystem->WriteLine(BufferLine);
}
}
Signalfluss
Modul main.cpp :
• Zentrales Programm mit setup() und loop()
• Globale Error()-Routine (Uart-Ausgabe)
• setup() : Ausgabe Program-Header, Ausgabe Help
• loop() : Analyse der eingehenden Uart-Daten und Ausführung der Commands
Module Command.cpp mit Class CCommand:
• Splitting Command/ParameterCount/ParamterA/B/C/D
• Analyse Commands SystemHelp/Abort/Reset/RefreshInterval
• Analyse Commands SystemLedOn/Off/Invert/Blink
• Execution aller eingehenden Commands (Execute())
Module CommandAnalysis.cpp :
• zu Command.cpp ergänzendes Modul mit Callback-OnExecute-Funktionen:
OnSystemHelp() / OnSystemAbort() / OnSystemReset()
OnSystemRefreshInterval(UInt32 time) / OnLedSystemOn() / OnLedSystemOff()
OnLedSystemInvert() / OnLedSystemBlink(UInt32 count, UInt32 timeon, UInt32 timeoff)
Module Led.cpp mit Class CLed:
• Constructor mit Vorgabe von Pin und Invert-State
• Initialisierung mit Open()
• Get()- und Set()(On/Off)-Funktionen
• Blink(UInt32 count, UInt32 timeon, UInt32 timeoff)-Routine
• Main: Permanenter Aufruf der Execute-Funktion (für Blink)
• Abort() der Blink()-Funktion
Module SerialUart.cpp mit Class CSerialUart:
• Constructor mit Vorgabe von RxD- und TxD-Pin
• Initialisierung mit Open()
• Write()-Funktionen mit unterschiedlichen Aufruf-Parametern
• ReadCharacter()-Funktion mit Character-Rückgabe-Parameter
• ReadLine()-Funktion mit Line-Rückgabe-Parameter
• Main: Permanenter Aufruf der Execute-Funktion (Poll RxD)
Modul Helper.cpp :
• Uart-Ausgabe der Response()- und Event()-Routine
Module System.cpp mit Class CSystem:
• Class CSystem : Periodischer System-Refresh über Uart zum PC
• Class CSystem : Vorgabe der Refresh-Periode [ms]
WebSites
Projekte
CCD_ControllerCommandDispatcher