WebSites
Projekte
CCD_ControllerCommandDispatcher
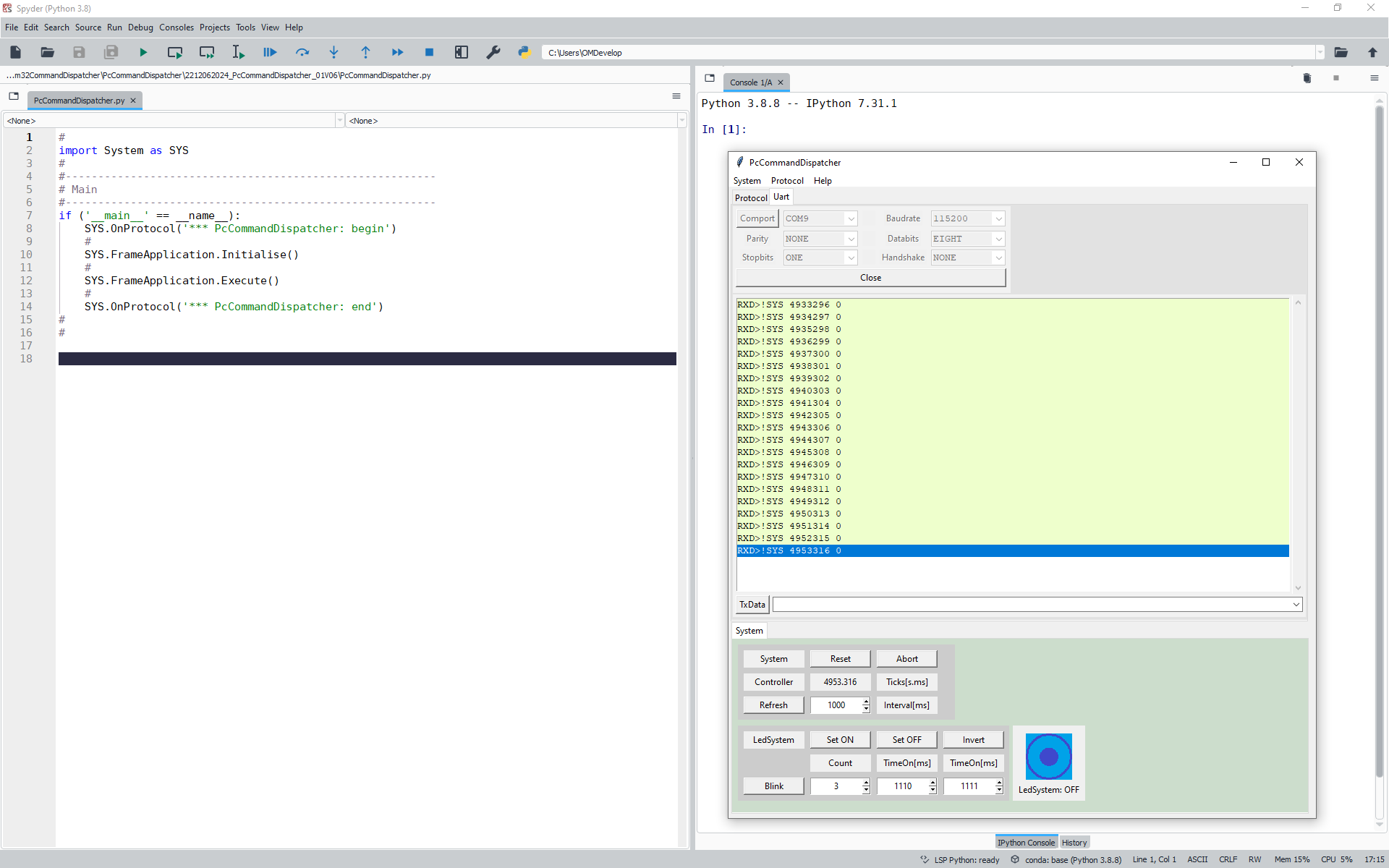
• PCCommandDispatcher unter der Spyder-Entwicklungsoberfläche
• vollständig in Python (und Tkinter) entwickelt
• aktuell nur unter Windows10 mit Standard-PC getestet
• spezielle UART-Funktionen verlangen Weiterentwicklung für Linux
• Senden von UART-ASCII-Commands vom PC zum MicroController
• Empfangen von UART-ASCII-Responses vom MicroController
• Empfangen von asynchronen UART-ASCII-Events des MicroControllers
• Minimale Version: nur Berücksichtigung von System- und Led-Commands
• Main-Modul : PcCommandDispatcher.py :
PC-CommandDispatcher
Übersicht
• PCCommandDispatcher unter der Spyder-Entwicklungsoberfläche
• vollständig in Python (und Tkinter) entwickelt
• aktuell nur unter Windows10 mit Standard-PC getestet
• spezielle UART-Funktionen verlangen Weiterentwicklung für Linux
• Senden von UART-ASCII-Commands vom PC zum MicroController
• Empfangen von UART-ASCII-Responses vom MicroController
• Empfangen von asynchronen UART-ASCII-Events des MicroControllers
• Minimale Version: nur Berücksichtigung von System- und Led-Commands
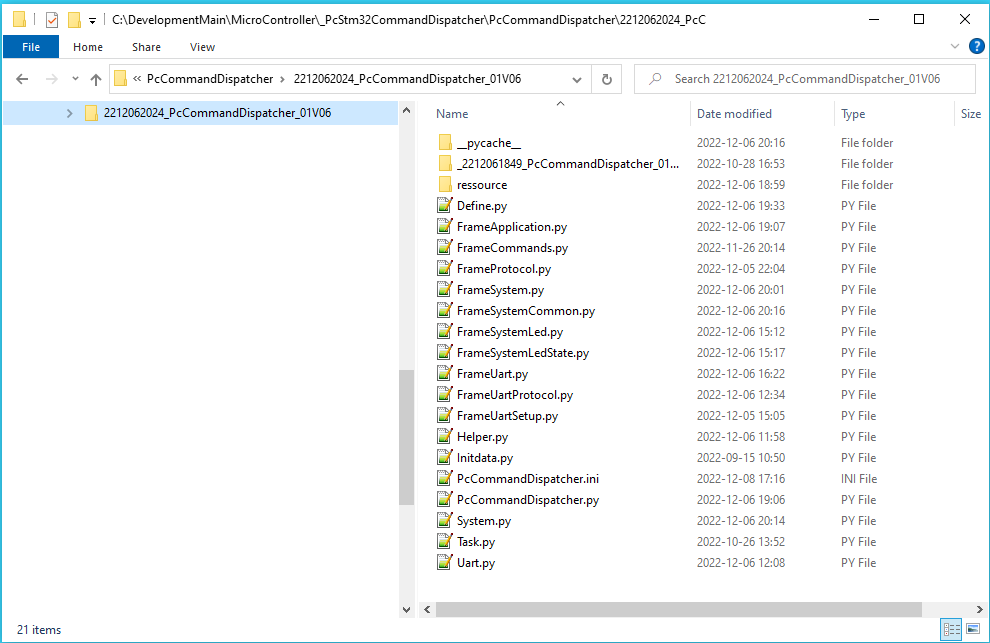
Download
• 2212062024 PcCommandDispatcher 01V06Bestandteile
• Main-Modul : PcCommandDispatcher.py :
#
import System as SYS
#
#---------------------------------------------------------
# Main
#---------------------------------------------------------
if ('__main__' == __name__):
SYS.OnProtocol('*** PcCommandDispatcher: begin')
#
SYS.FrameApplication.Initialise()
#
SYS.FrameApplication.Execute()
#
SYS.OnProtocol('*** PcCommandDispatcher: end')
#
#
• Modul : System.py :
#
import tkinter as TKI
#
import Define as DEF
import Uart as URT
import FrameApplication as FRA
import FrameSystemLedState as FSLS
#
global FrameApplication
#---------------------------------------------------------
# Main - Function
#---------------------------------------------------------
def OnError(text):
FrameApplication.Error(text)
def OnProtocol(line):
FrameApplication.Protocol(line)
#
def SystemOnAbort():
UartController.Abort()
#------------------------------------------------------------
# Callback - Uart
#------------------------------------------------------------
def UartOnOpen():
FrameApplication.tbsUart.FrameUartProtocol.ControlsEnable()
FrameApplication.tbsSystem.ControlsEnable()
return
def UartOnClose():
FrameApplication.tbsUart.FrameUartProtocol.ControlsDisable()
FrameApplication.tbsSystem.ControlsDisable()
return
def UartOnLineReceived(rxline):
# ':xxx' in Uart RxLine respected
FrameApplication.tbsUart.FrameUartProtocol.AddRxLine(rxline)
if ('!Error:' in rxline):
OnProtocol(rxline)
SystemOnAbort() # reenable Handshake
Text = rxline[8:-1]
OnError(Text)
return
if ('!SYS' in rxline):
Text = rxline[5:]
Tokens = Text.split(' ')
#debug print('>>>', Tokens)
FRM = FrameApplication.tbsSystem.frmSystemCommon
FRM.SetControllerTicks(float(Tokens[0]) / 1000.0)
return
if ('!LSO' == rxline):
FRM = FrameApplication.tbsSystem.frmSystemLedState
FRM.SetState(FSLS.EStateLed.sldOn)
return
if ('!LSF' == rxline):
FRM = FrameApplication.tbsSystem.frmSystemLedState
FRM.SetState(FSLS.EStateLed.sldOff)
return
return
def UartOnLineTransmit(txline):
FrameApplication.tbsUart.FrameUartProtocol.AddTxLine(txline)
return
#------------------------------------------------------------
# Callback - FrameSetupGlobal
#------------------------------------------------------------
def FrameUartProtocolOnTransmitLine(txline):
UartController.TransmitLine(txline)
#------------------------------------------------------------
# Callback - FrameSystemCommon
#------------------------------------------------------------
def FrameSystemCommonOnReset():
UartController.TransmitLine('R')
def FrameSystemCommonOnAbort():
UartController.TransmitLine('A')
def FrameSystemCommonOnRefreshInterval(interval):
UartController.TransmitLine('SRI {0}'.format(interval))
#------------------------------------------------------------
# Callback - FrameSystemLed
#------------------------------------------------------------
def FrameSystemLedOnSetOn():
UartController.TransmitLine('LSO')
def FrameSystemLedOnSetOff():
UartController.TransmitLine('LSF')
def FrameSystemLedOnInvert():
UartController.TransmitLine('LSI')
def FrameSystemLedOnBlink(blinkcount, timeon, timeoff):
UartController.TransmitLine('LSB {0} {1} {2}'.format(blinkcount, timeon, timeoff))
#------------------------------------------------------------
# Callback - Protocol
#------------------------------------------------------------
def FrameProtocolOnWriteToFile():
FrameApplication.tbsProtocol.WriteToFile()
return
def FrameProtocolOnClearAll():
FrameApplication.tbsProtocol.ClearAll()
return
# Uart
def FrameProtocolUartOnWriteToFile():
FrameApplication.tbsProtocolUart.WriteToFile()
return
def FrameProtocolUartOnClearAll():
FrameApplication.tbsProtocolUart.ClearAll()
return
#---------------------------------------------------------
# Main - Callback
#---------------------------------------------------------
def OnFrameApplicationDelete():
try:
UartController.Close()
FrameApplication.WriteInitdata(DEF.NAME_INITFILE)
except:
pass
#--------------------------------------------------------------------
# Field - Global
#--------------------------------------------------------------------
UartController = URT.CUart()
UartController.SetOnProtocol(OnProtocol)
UartController.SetOnOpen(UartOnOpen)
UartController.SetOnClose(UartOnClose)
UartController.SetOnLineReceived(UartOnLineReceived)
UartController.SetOnLineTransmit(UartOnLineTransmit)
#
FrameApplication = FRA.CFrameApplication(TKI.Tk(),
OnFrameApplicationDelete)
FrameApplication.SetOnProtocolWriteToFile(FrameProtocolOnWriteToFile)
FrameApplication.SetOnProtocolClearAll(FrameProtocolOnClearAll)
FrameApplication.SetOnProtocolUartWriteToFile(FrameProtocolUartOnWriteToFile)
FrameApplication.SetOnProtocolUartClearAll(FrameProtocolUartOnClearAll)
#
FRM = FrameApplication.tbsSystem.frmSystemCommon
FRM.SetSystemOnReset(FrameSystemCommonOnReset)
FRM.SetSystemOnAbort(FrameSystemCommonOnAbort)
FRM.SetSystemOnRefreshInterval(FrameSystemCommonOnRefreshInterval)
#
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnSetOn(FrameSystemLedOnSetOn)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnSetOff(FrameSystemLedOnSetOff)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnInvert(FrameSystemLedOnInvert)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnBlink(FrameSystemLedOnBlink)
#
FrameApplication.tbsUart.FrameUartSetup.SetLinkUart(UartController)
FrameApplication.tbsUart.FrameUartProtocol.SetOnTransmitLine(FrameUartProtocolOnTransmitLine)
• Modul : FrameApplication.py :
import tkinter as TKI
from tkinter import ttk as TTK
from tkinter import messagebox as TKMB
from tkinter import filedialog as TKFD
#
import Define as DEF
import Initdata as ID
import FrameProtocol as FPT
import FrameSystem as FST
import FrameUart as FUT
#
class CFrameApplication(TKI.Frame):
def __init__(self, frameparent, onframeapplicationdelete):
TKI.Frame.__init__(self, frameparent)
self.FrameParent = frameparent
self.FrameParent.protocol('WM_DELETE_WINDOW', self.OnWMDeleteWindow)
self.OnFrameApplicationDelete = onframeapplicationdelete
#--------------------------------------------------------
# Common
#--------------------------------------------------------
#self.FrameParent.rowconfigure(0, weight=1)
#self.FrameParent.columnconfigure(0, weight=1)
self.FrameParent.geometry('804x626+66+66')
#self.FrameParent.geometry('804x626+2022+33')
self.FrameParent.title(DEF.APPLICATION_TITLE)
#
self.IsActive = False
#--------------------------------------------------------
# Menu
#--------------------------------------------------------
self.Menu = TKI.Menu(self.FrameParent)
self.FrameParent.config(menu = self.Menu)
# Menu - System
self.MenuSystem = TKI.Menu(self.Menu, tearoff=0)
self.Menu.add_cascade(label = "System", menu = self.MenuSystem)
self.MenuSystem.add_command(label = "Read Initfile Default", \
command = self.OnReadInitfileDefault)
self.MenuSystem.add_command(label = "Read Initfile Dialog", \
command = self.OnReadInitfileDialog)
self.MenuSystem.add_separator()
self.MenuSystem.add_command(label = "Write Initfile Default", \
command = self.OnWriteInitfileDefault)
self.MenuSystem.add_command(label = "Write Initfile Dialog", \
command = self.OnWriteInitfileDialog)
self.MenuSystem.add_command(label = "Exit Application", \
command = self.OnExitApplication)
# Menu - Device
self.MenuDevice = TKI.Menu(self.Menu, tearoff=0)
self.Menu.add_cascade(label = "Protocol", menu = self.MenuDevice)
self.MenuDevice.add_command(label = "Global", state="disabled")
self.MenuDevice.add_command(label = "Write to File",
command = self.OnProtocolWriteToFile)
self.MenuDevice.add_command(label = "Clear All",
command = self.OnProtocolClearAll)
self.MenuDevice.add_separator()
self.MenuDevice.add_command(label = "Uart", state="disabled")
self.MenuDevice.add_command(label = "Write to File",
command = self.OnProtocolUartWriteToFile)
self.MenuDevice.add_command(label = "Clear All",
command = self.OnProtocolUartClearAll)
# Menu - Help
self.MenuHelp = TKI.Menu(self.Menu, tearoff=0)
self.Menu.add_cascade(label = "Help", menu = self.MenuHelp)
self.MenuHelp.add_command(label = "Show About", command = self.OnShowAbout)
#--------------------------------------------------------
# Notebook
#--------------------------------------------------------
self.ntbView = TTK.Notebook(self.FrameParent)
self.ntbView.place(x=3, y=0, width=800, height=600)
#--------------------------------------------------------
# Notebook - Tabsheet - Protocol
#--------------------------------------------------------
self.tbsProtocol = FPT.CFrameProtocol(self.ntbView)
self.ntbView.add(self.tbsProtocol, text='Protocol')
#--------------------------------------------------------
# Notebook - Tabsheet - Uart
#--------------------------------------------------------
self.tbsUart = FUT.CFrameUart(self.ntbView)
self.ntbView.add(self.tbsUart, text = "Uart")
#--------------------------------------------------------
# FrameCommand (11)
#--------------------------------------------------------
self.ntbCommands = TTK.Notebook(self.FrameParent)
self.ntbCommands.place(x=4, y=600, width=800, height=266)
#--------------------------------------------------------
self.tbsSystem= FST.CFrameSystem(self.FrameParent)
self.ntbCommands.add(self.tbsSystem, text='System')
#--------------------------------------------------------
self.PProtocolWriteToFile = None
self.PProtocolClearAll = None
self.PProtocolUartWriteToFile = None
self.PProtocolUartClearAll = None
#
return
#---------------------------------------------------------------------
# CApplication - Property
#---------------------------------------------------------------------
def SetOnProtocolWriteToFile(self, onprotocolwritetofile):
self.PProtocolWriteToFile = onprotocolwritetofile
def SetOnProtocolClearAll(self, onprotocolclearall):
self.PProtocolClearAll = onprotocolclearall
def SetOnProtocolUartWriteToFile(self, onprotocoluartwritetofile):
self.PProtocolUartWriteToFile = onprotocoluartwritetofile
def SetOnProtocolUartClearAll(self, onprotocoluartclearall):
self.PProtocolUartClearAll = onprotocoluartclearall
#---------------------------------------------------------------------
# CApplication - Initdata
#---------------------------------------------------------------------
def Initialise(self):
self.IsActive = True
self.Protocol('CFrameApplication.Initialise')
self.ReadInitdata(DEF.NAME_INITFILE)
return
#
def ReadInitdata(self, filename):
self.Protocol('CFrameApplication.ReadInitdata: begin')
RID = ID.CReadInitdata()
RID.Open(filename)
X = RID.ReadValueInit(DEF.INITDATA_SECTION, DEF.NAME_X, DEF.INIT_X)
Y = RID.ReadValueInit(DEF.INITDATA_SECTION, DEF.NAME_Y, DEF.INIT_Y)
W = RID.ReadValueInit(DEF.INITDATA_SECTION, DEF.NAME_W, DEF.INIT_W)
H = RID.ReadValueInit(DEF.INITDATA_SECTION, DEF.NAME_H, DEF.INIT_H)
self.FrameParent.geometry('%dx%d+%d+%d' % (int(W), int(H), int(X), int(Y)))
#
STI = RID.ReadValueInit(DEF.INITDATA_SECTION, DEF.NAME_SELECTTABINDEX,
DEF.INIT_SELECTTABINDEX)
self.ntbView.select(int(STI))
#
self.tbsProtocol.ReadInitdata(RID)
self.tbsUart.ReadInitdata(RID)
#
self.tbsSystem.ReadInitdata(RID)
#
RID.Close()
self.Protocol('CFrameApplication.ReadInitdata: end')
return
#
def WriteInitdata(self, filename):
self.Protocol('CFrameApplication.WriteInitdata: begin')
WID = ID.CWriteInitdata()
WID.Open(filename)
X = self.FrameParent.winfo_x()
Y = self.FrameParent.winfo_y()
W = self.FrameParent.winfo_width()
H = self.FrameParent.winfo_height()
WID.WriteSection(DEF.INITDATA_SECTION)
WID.WriteValue(DEF.INITDATA_SECTION, DEF.NAME_X, str(X))
WID.WriteValue(DEF.INITDATA_SECTION, DEF.NAME_Y, str(Y))
WID.WriteValue(DEF.INITDATA_SECTION, DEF.NAME_W, str(W))
WID.WriteValue(DEF.INITDATA_SECTION, DEF.NAME_H, str(H))
#
STI = self.ntbView.index('current')
WID.WriteValue(DEF.INITDATA_SECTION, DEF.NAME_SELECTTABINDEX, str(STI))
#
self.tbsProtocol.WriteInitdata(WID)
self.tbsUart.WriteInitdata(WID)
#
self.tbsSystem.WriteInitdata(WID)
#
WID.Close()
self.Protocol('CFrameApplication.WriteInitdata: end')
return
#---------------------------------------------------------------------
# CApplication - Helper
#---------------------------------------------------------------------
def Error(self, text):
if (self.IsActive):
self.tbsProtocol.Error(text)
TKMB.showerror('Error', text)
return
def Protocol(self, line):
if (self.IsActive):
self.tbsProtocol.Line(line)
return
#---------------------------------------------------------------------
# CApplication - Callback / Event
#---------------------------------------------------------------------
def OnWMDeleteWindow(self):
self.IsActive = False
self.WriteInitdata(DEF.NAME_INITFILE)
if (None != self.OnFrameApplicationDelete):
self.OnFrameApplicationDelete()
self.FrameParent.destroy()
return
#
def OnReadInitfileDefault(self):
self.ReadInitdata(DEF.NAME_INITFILE)
return
#
def OnReadInitfileDialog(self):
FT = (('Initfiles', '*.ini'),
('All files', '*.*'))
FN = DEF.NAME_INITFILE
FN = TKFD.askopenfilename(title = 'Read Initfile',
initialdir = '../TerminalUart',
filetypes = FT)
self.ReadInitdata(FN)
return
#
def OnWriteInitfileDefault(self):
self.WriteInitdata(DEF.NAME_INITFILE)
return
#
def OnWriteInitfileDialog(self):
FT = (('Initfiles', '*.ini'),
('All files', '*.*'))
FN = DEF.NAME_INITFILE
FF = TKFD.asksaveasfile(initialfile = FN,
defaultextension = '.ini',
filetypes = FT)
if (None != FF):
FN = FF.name
FF.close()
self.WriteInitdata(FN)
return
#
def OnProtocolWriteToFile(self):
if (None != self.PProtocolWriteToFile):
self.PProtocolWriteToFile()
return
def OnProtocolClearAll(self):
if (None != self.PProtocolClearAll):
self.PProtocolClearAll()
return
#
def OnProtocolUartWriteToFile(self):
if (None != self.PProtocolUartWriteToFile):
self.PProtocolUartWriteToFile()
return
def OnProtocolUartClearAll(self):
if (None != self.PProtocolUartClearAll):
self.PProtocolUartClearAll()
return
def OnShowAbout(self):
TKMB.showinfo("About", DEF.INFO_ABOUT)
#
def OnExitApplication(self):
self.OnWMDeleteWindow()
#---------------------------------------------------------------------
# CApplication - Handler
#---------------------------------------------------------------------
def Execute(self):
self.FrameParent.mainloop()
#
#
#
#
• Module : (Frame...).py :
FrameCommand.py
FrameProtocol.py
FrameSystem.py
FrameSystemCommon.py
FrameSystemLed.py
FrameSystemLedState.py
FrameUart.py
FrameUartProtocol.py
FrameUartSetup.py
• Modul : Initdata.py :
#
# ------------------------------------------------------------------
# Initdata
# ------------------------------------------------------------------
# Version: 02V11
# Date : 220915
# Time : 1040
# Author : OMDevelop
#
import configparser as CFP
#
import Helper as HLP
#
class CWriteInitdata():
#
def __init__(self):
self.Parser = CFP.ConfigParser()
self.Parser.optionxform = str
#
def Open(self, filename):
self.Filename = filename
#
def Close(self):
self.File = open(self.Filename, 'w')
self.Parser.write(self.File)
self.File.close()
self.Parser = None
#
def WriteSection(self, section):
self.Parser.add_section(section)
# debug print("WriteSection[" + section + "]")
def WriteValue(self, section, name, value):
self.Parser.set(section, name, value)
# debug print("WriteValue[" + section + "] Name[" + name + "] Value[" + value + "]")
#
#
#
class CReadInitdata():
#
def __init__(self):
self.Parser = CFP.ConfigParser()
self.Parser.optionxform = str
#
def Open(self, filename):
self.Parser.read(filename)
#
def Close(self):
self.Parser = None
#
def ReadValue(self, section, name):
Value = "???"
try:
Value = self.Parser.get(section, name)
# debug print("ReadValue[" + section + "] Name[" + name + "] Value[" + Value + "]")
return Value
except:
# debug print("ReadValue[" + section + "] Name[" + name + "] Value[" + Value + "]")
return "?"
#
def ReadValueInit(self, section, name, init):
Value = init
try:
Value = self.Parser.get(section, name)
# debug print("ReadValue[" + section + "] Name[" + name + "] Value[" + Value + "][" + init + "]")
return Value
except:
# debug print("ReadValue[" + section + "] Name[" + name + "] Value[" + Value + "][" + init + "]")
return Value
#
#
• Modul : Uart.py :
#
import tkinter as TKI
#
import Define as DEF
import Uart as URT
import FrameApplication as FRA
import FrameSystemLedState as FSLS
#
global FrameApplication
#---------------------------------------------------------
# Main - Function
#---------------------------------------------------------
def OnError(text):
FrameApplication.Error(text)
def OnProtocol(line):
FrameApplication.Protocol(line)
#
def SystemOnAbort():
UartController.Abort()
#------------------------------------------------------------
# Callback - Uart
#------------------------------------------------------------
def UartOnOpen():
FrameApplication.tbsUart.FrameUartProtocol.ControlsEnable()
FrameApplication.tbsSystem.ControlsEnable()
return
def UartOnClose():
FrameApplication.tbsUart.FrameUartProtocol.ControlsDisable()
FrameApplication.tbsSystem.ControlsDisable()
return
def UartOnLineReceived(rxline):
# ':xxx' in Uart RxLine respected
FrameApplication.tbsUart.FrameUartProtocol.AddRxLine(rxline)
if ('!Error:' in rxline):
OnProtocol(rxline)
SystemOnAbort() # reenable Handshake
Text = rxline[8:-1]
OnError(Text)
return
if ('!SYS' in rxline):
Text = rxline[5:]
Tokens = Text.split(' ')
#debug print('>>>', Tokens)
FRM = FrameApplication.tbsSystem.frmSystemCommon
FRM.SetControllerTicks(float(Tokens[0]) / 1000.0)
return
if ('!LSO' == rxline):
FRM = FrameApplication.tbsSystem.frmSystemLedState
FRM.SetState(FSLS.EStateLed.sldOn)
return
if ('!LSF' == rxline):
FRM = FrameApplication.tbsSystem.frmSystemLedState
FRM.SetState(FSLS.EStateLed.sldOff)
return
return
def UartOnLineTransmit(txline):
FrameApplication.tbsUart.FrameUartProtocol.AddTxLine(txline)
return
#------------------------------------------------------------
# Callback - FrameSetupGlobal
#------------------------------------------------------------
def FrameUartProtocolOnTransmitLine(txline):
UartController.TransmitLine(txline)
#------------------------------------------------------------
# Callback - FrameSystemCommon
#------------------------------------------------------------
def FrameSystemCommonOnReset():
UartController.TransmitLine('R')
def FrameSystemCommonOnAbort():
UartController.TransmitLine('A')
def FrameSystemCommonOnRefreshInterval(interval):
UartController.TransmitLine('SRI {0}'.format(interval))
#------------------------------------------------------------
# Callback - FrameSystemLed
#------------------------------------------------------------
def FrameSystemLedOnSetOn():
UartController.TransmitLine('LSO')
def FrameSystemLedOnSetOff():
UartController.TransmitLine('LSF')
def FrameSystemLedOnInvert():
UartController.TransmitLine('LSI')
def FrameSystemLedOnBlink(blinkcount, timeon, timeoff):
UartController.TransmitLine('LSB {0} {1} {2}'.format(blinkcount, timeon, timeoff))
#------------------------------------------------------------
# Callback - Protocol
#------------------------------------------------------------
def FrameProtocolOnWriteToFile():
FrameApplication.tbsProtocol.WriteToFile()
return
def FrameProtocolOnClearAll():
FrameApplication.tbsProtocol.ClearAll()
return
# Uart
def FrameProtocolUartOnWriteToFile():
FrameApplication.tbsProtocolUart.WriteToFile()
return
def FrameProtocolUartOnClearAll():
FrameApplication.tbsProtocolUart.ClearAll()
return
#---------------------------------------------------------
# Main - Callback
#---------------------------------------------------------
def OnFrameApplicationDelete():
try:
UartController.Close()
FrameApplication.WriteInitdata(DEF.NAME_INITFILE)
except:
pass
#--------------------------------------------------------------------
# Field - Global
#--------------------------------------------------------------------
UartController = URT.CUart()
UartController.SetOnProtocol(OnProtocol)
UartController.SetOnOpen(UartOnOpen)
UartController.SetOnClose(UartOnClose)
UartController.SetOnLineReceived(UartOnLineReceived)
UartController.SetOnLineTransmit(UartOnLineTransmit)
#
FrameApplication = FRA.CFrameApplication(TKI.Tk(),
OnFrameApplicationDelete)
FrameApplication.SetOnProtocolWriteToFile(FrameProtocolOnWriteToFile)
FrameApplication.SetOnProtocolClearAll(FrameProtocolOnClearAll)
FrameApplication.SetOnProtocolUartWriteToFile(FrameProtocolUartOnWriteToFile)
FrameApplication.SetOnProtocolUartClearAll(FrameProtocolUartOnClearAll)
#
FRM = FrameApplication.tbsSystem.frmSystemCommon
FRM.SetSystemOnReset(FrameSystemCommonOnReset)
FRM.SetSystemOnAbort(FrameSystemCommonOnAbort)
FRM.SetSystemOnRefreshInterval(FrameSystemCommonOnRefreshInterval)
#
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnSetOn(FrameSystemLedOnSetOn)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnSetOff(FrameSystemLedOnSetOff)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnInvert(FrameSystemLedOnInvert)
FrameApplication.tbsSystem.frmSystemLed.SetLedSystemOnBlink(FrameSystemLedOnBlink)
#
FrameApplication.tbsUart.FrameUartSetup.SetLinkUart(UartController)
FrameApplication.tbsUart.FrameUartProtocol.SetOnTransmitLine(FrameUartProtocolOnTransmitLine)
• Modul : Task.py :
#
# ------------------------------------------------------------------
# Task
# ------------------------------------------------------------------
# Version: 02V06
# Date : 221005
# Time : 1522
# Author : OMDevelop
#
import threading as THR
# NC import time
#
class CEvent:
def __init__(self, initstate = False):
self.FEvent = THR.Event()
if (initstate):
self.FEvent.set()
else:
self.FEvent.clear()
#
def Clear(self):
self.FEvent.clear()
def Set(self):
self.FEvent.set()
#
def Wait(self):
self.FEvent.wait()
#
#
class CTask:
def __init__(self, id, cbonstart, cbonabort, cbonexecute):
self.ID = id
self.FThread = None
self.DoLoop = True
self.CBOnStart = cbonstart
self.CBOnAbort = cbonabort
self.CBOnExecute = cbonexecute
#
def SetCBOnExecute(self, callback):
self.CBOnExecute = callback
#
def IsBusy(self):
return self.DoLoop
#
def Start(self):
self.DoLoop = True
if isinstance(self.FThread, THR.Thread):
self.Abort()
self.FThread = None
self.FThread = THR.Thread(target = self.OnExecute)
self.FThread.start()
if (None != self.CBOnStart):
self.CBOnStart(self)
#
def Abort(self):
try:
self.DoLoop = False
if (None != self.CBOnAbort):
self.CBOnAbort(self)
# hangsup if (None != self.FThread):
# hangsup self.FThread.join()
# hangsup if isinstance(self.FThread, threading.Thread):
# hangsup self.FThread.join()
except:
pass
#
def OnExecute(self):
try:
self.DoLoop = True;
while (True == self.DoLoop):
if (None != self.CBOnExecute):
self.DoLoop = self.CBOnExecute(self)
self.Abort()
except:
pass
• Modul : Define.py :
#
#------------------------------------------------------------------
# Global Constant
#------------------------------------------------------------------
APPLICATION_TITLE = "PcCommandDispatcher"
APPLICATION_VERSION = "01V08"
APPLICATION_DATE = "221206"
APPLICATION_TIME = "1405"
APPLICATION_AUTHOR = "OMDevelop"
#
APPLICATION_ABSTRACT_00 = "PC-Command Dispatcher"
APPLICATION_ABSTRACT_01 = ""
APPLICATION_ABSTRACT_02 = ""
#
INFO_ABOUT = APPLICATION_TITLE + "\r\n\r\n" + \
"Version: " + APPLICATION_VERSION + "\r\n" + \
"Date: " + APPLICATION_DATE + "\r\n" + \
"Time: " + APPLICATION_TIME + "\r\n" + \
"Author: " + APPLICATION_AUTHOR + "\r\n" + \
"\r\n" + \
"Abstract:\r\n" + \
"- " + APPLICATION_ABSTRACT_00 + "\r\n" + \
"- " + APPLICATION_ABSTRACT_01 + "\r\n" + \
"- " + APPLICATION_ABSTRACT_02 + ""
#
NAME_INITFILE = APPLICATION_TITLE + ".ini"
INITDATA_SECTION = "WindowMain"
NAME_X = "X"
NAME_Y = "Y"
NAME_W = "W"
NAME_H = "H"
NAME_SELECTTABINDEX = "SelectTabIndex"
#
INIT_X = "10"
INIT_Y = "10"
INIT_W = "690"
INIT_H = "546"
INIT_SELECTTABINDEX = "0"
#--------------------------------------
FRAMEINDEX_SETUP = 0
FRAMEINDEX_UARTDATAFLOW = 1
FRAMEINDEX_REPORT = 2
FRAMEINDEX_PLOT2D = 3
FRAMEINDEX_HARDWARE = 4
#
DOTS_X = 600
DOTS_Y = 600
DOTSPERINCH = 100
#
LIMIT_X_LOW = +0.0
LIMIT_X_HIGH = +10.0
LIMIT_Y_LOW = +0.0
LIMIT_Y_HIGH = +10.0
LIMIT_Z_LOW = -5.0
LIMIT_Z_HIGH = +5.0
##
PAD_X = 2
PAD_Y = 2
FONTSIZE_LISTBOX = 11
COLOR_BACK = "#F8FEEE"
#
#
TIME_REFRESH = 0.10 # [s] -> GCodeSimulator!
#
INIT_AZIMUTH = +30.00 # [deg]
INIT_DAZIMUTH = +0.50 # [deg]
INIT_ELEVATION = +30.00 # [deg]
INIT_DELEVATION = +0.25 # [deg]
#
#
##############################################
#
#----------------------------------------------
# F-Code
#----------------------------------------------
CODE_F = 'F' # Set Feedrate [mm/s]
#----------------------------------------------
# G-Code
#----------------------------------------------
CODE_G = 'G'
#
CODE_G0 = 'G0' # Rapid Positioning at Feedrate : G0 X50 Y50 Z0
CODE_G00 = 'G0' # G0
CODE_G1 = 'G1' # Linear Movement at Feedrate : G1 X100 Y100 Z0 F100
CODE_G01 = 'G1' # G1
CODE_G2 = 'G2' # Cut Clockwise Arc : G2 X8Y5 I8 J5 F100
CODE_G02 = 'G2' # G2
CODE_G3 = 'G3' # Cut AntiClockwise Arc
CODE_G03 = 'G3' # G3
CODE_G4 = 'G4' # Pause [seconds]
CODE_G04 = 'G4' # G4
#
CODE_G17 = 'G17' #
CODE_G18 = 'G18'
CODE_G19 = 'G19'
CODE_G20 = 'G20' # Select Imperial Units [inch]
CODE_G21 = 'G21' # Select Metric Units [meter]
CODE_G28 = 'G28' # Goto Predefined Position
CODE_G28p2 = 'G28.2' # Run Homing Cycle
#
CODE_G38p2 = 'G38.2' # Probe moves to Workpart with distanceout : G38.2 Z-65 F100
CODE_G38p3 = 'G38.3' # Probe moves to Workpart without check : G38.3 Z-65 F100
CODE_G38p4 = 'G38.4' # Probe moves from Workpart with distanceout : G38.4 Z-65 F100
CODE_G38p5 = 'G38.5' # Probe moves from Workpart without check : G38.5 Z-65 F100
#
CODE_G53 = 'G53' # Motion in MachineCoordinates (only G0/G1) : G53 G0 X50 Y50 Z0
CODE_G54 = 'G54' # Select Coordinate System 1 : ???
CODE_G55 = 'G54' # Select Coordinate System 2 : ???
CODE_G56 = 'G54' # Select Coordinate System 3 : ???
CODE_G57 = 'G54' # Select Coordinate System 4 : ???
CODE_G58 = 'G54' # Select Coordinate System 5 : ???
CODE_G59 = 'G54' # Select Coordinate System 6 : ???
#
CODE_G80 = 'G80' # Cancel Motion Modes : ???
#
CODE_G90 = 'G90' # Moving in Absolute (Machine)Coordinates : G90 G0 X50
CODE_G91 = 'G91' # Moving in Relative Coordinates : G91 G0 X50
CODE_G92 = 'G92' # Defines WorkCoordinates at X/Y/Z
CODE_G92p1 = 'G92.1' # Resets WorkCoordinates to MachineCoordinates
#
CODE_G94 = 'G94' # Feed per Minute Mode [mm/s] -> [mm/min]
#
#-----------------------------------------------------------------------------------------
# M-Code
#-----------------------------------------------------------------------------------------
CODE_M = 'M'
#
CODE_M0 = 'M0' # Program End : M0
CODE_M2 = 'M1' # Sleep / Stop : M2
CODE_M3 = 'M3' # Switch Spindle On (S:Speed[rot/s]): M3 S12000
CODE_M5 = 'M5' # Switch Spindle Off : M5
CODE_M6 = 'M6' # Replace with Tool, display Message: M6 T42 (T42-message)
CODE_M8 = 'M8' # Switch Coolant On : M8
CODE_M9 = 'M9' # Switch Coolant Off : M9
#
CODE_M30 = 'M30' # Program Pause and End : M30
#
#
#----------------------------------------------
# Parameter-Code
#----------------------------------------------
CODE_NULL = ''
CODE_COMMENT = ';'
CODE_X = 'X'
CODE_Y = 'Y'
CODE_Z = 'Z'
CODE_H = 'H'
CODE_I = 'I'
CODE_J = 'J'
CODE_K = 'K'
CODE_L = 'L'
CODE_N = 'N'
CODE_P = 'P'
CODE_R = 'R'
CODE_S = 'S'
CODE_T = 'T'
CODE_F = 'F'
#
#
• Modul : Helper.py :
#
# Helper
#
import numpy as NUM
#
#-----------------------------------------------------------
# Constant
#-----------------------------------------------------------
PIRAD = NUM.pi
PIDRAD = 2.0 * NUM.pi
PIHRAD = 0.5 * NUM.pi
PIQRAD = 0.25 * NUM.pi
#
PIDEG = 180.0
PIDDEG = 360.0
PIHDEG = 90.0
PIQDEG = 45.0
#
#----------------------------------------------
# Conversion
#----------------------------------------------
def BooleanString(bvalue):
if (True == bvalue):
return "True"
return "False"
#
def StringBoolean(text):
Text = text.upper()
if ("T" in Text):
return True
if ("1" in Text):
return True
return False
#
def RadDeg(rad):
return PIDEG * rad / PIRAD
def DegRad(deg):
return PIRAD * deg / PIDEG
#
def ArcTanPos(dy, dx):
AR = NUM.arctan2(dy, dx)
if (AR < 0.0):
AR += PIDRAD
return AR
#
#
Signalfluss
• Main-Modul : PcCommandDispatcher.py
Aufruf der Initialisierung des Application-Moduls
Aufruf Execute-Methode Application-Modul
• Modul : System.py
Globale Callback-Funktionen Messages
Globale Callback-Funktionen Uart
Globale Callback-Funktionen Commands
OnDelete-Callback beim Schliessen des Programms
Zentraler Set-Verteiler für alle Callback-Funktionen
• Modul : FrameApplication.py
Constructor mit Menu- und Control-Definitionen
Verzweigung zu allen SubFrames Frame-Hierachie
Read/WriteInitdata zum Lesen/Schreiben der FrameApplication-Init-Daten
On-Callback-Funktionen für Menu- und Button-Funktionen
Execute-Methode mit Aufruf vom Main-Module
• alle restlichen Module : Frame(...).py
Verteiler für Control-Funktionen
besitzen Read/WriteInitdata zum Lesen/Schreiben der Control-Values
• Module : Initdata.py mit Classes CWrite/CReadInitdata
Zentrales Modul aller CWriteInitdata-Class-Methoden
Zentrales Modul aller CReadInitdata-Class-Methoden
Alle Transfer-Daten vom Typ String
• Module : Uart.py mit Class CUart
Uart-Module mit Kapselung der seriellen Read- Und Write-Methoden
Callback-Funktion zur Behandlung aller einkommenden Daten
eigener Thread für glatten Verlauf der Rx- und TxDaten
• Module : Task.py mit Class CTask
Callback-Methoden OnStart/OnAbort/OnExecute für Benutzer-Methoden
CEvent als Signal-Class zur Synchronisation von mehreren Threads
• Module : Define.py
beinhaltet alle globalen Term-Defitionen
• Module : Helper.py
beinhaltet allgemeine globale Funktionen (String-, Mathe-,...)
WebSites
Projekte
CCD_ControllerCommandDispatcher