Esp32UnoBoard - DRV8825 Limit-/Reference-Switches
Quellen
Mouser : Datasheet DRV8825starthardware.org : StepperMotor mit dem DRV8825 steuern
openhardsoftware.de : Grundlage: Esp32UnoBoard - StepperMotorDriver DRV8825
Übersicht
Auf der Grundlage der StepperMotor-Ansteuerung:openhardsoftware.de : Esp32UnoBoard - StepperMotorDriver DRV8825
werden nun zwei Endschalter SLL und SLH (SLL - SwitchLimitLow, SLH - SwitchLimitHigh)
und ein Referenzschalter SRF (SRF - SwitchReFerence) ergänzt.
Die Schalter sind im Schaltplan als Öffner realisiert:
• inaktiver Zustand: geschlossen (Pin1-Pin2) -> logisch High
• aktiver Zustand: geöffnet (Pin2-Pin3) -> logisch Low

Wiring / Hardware
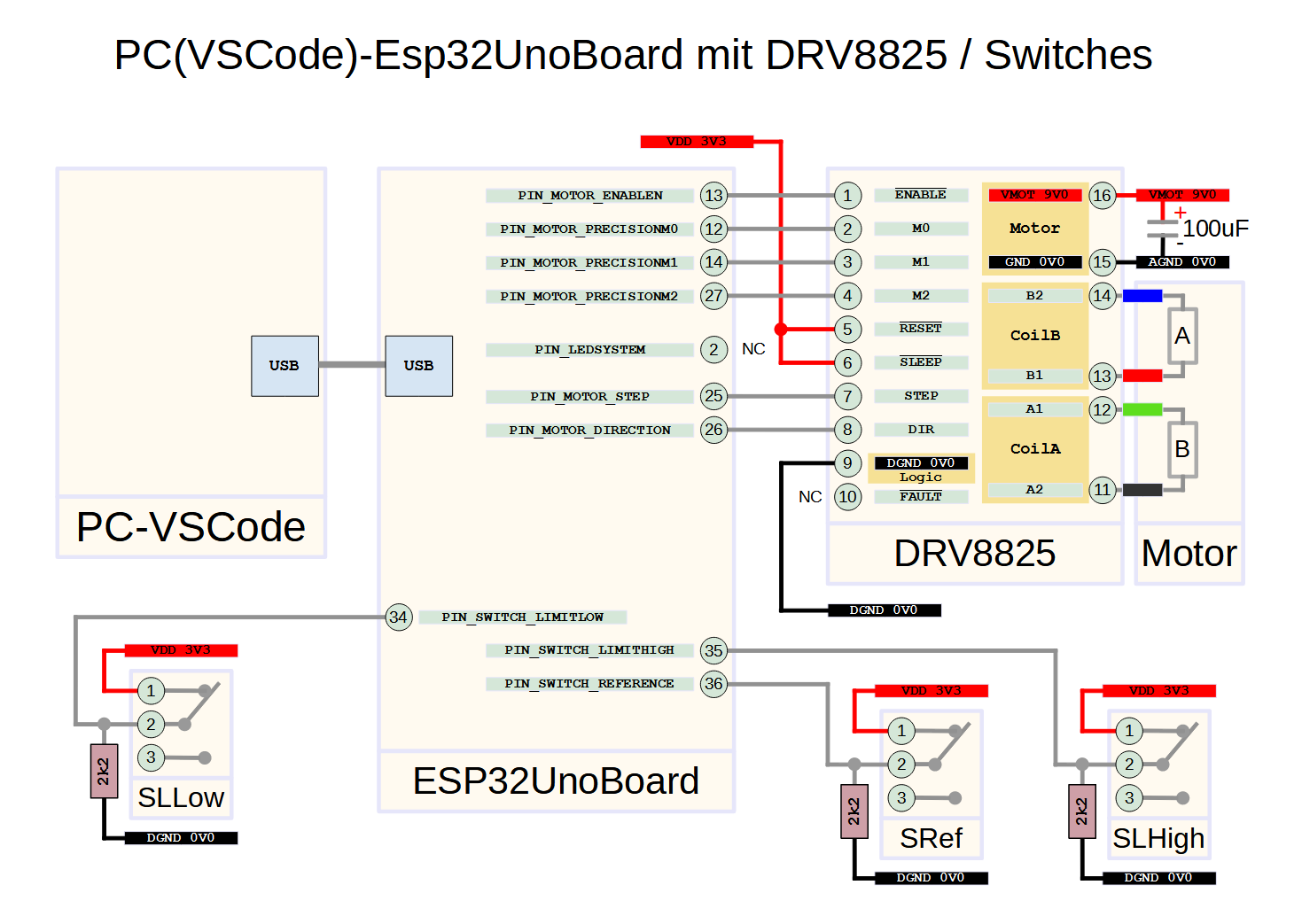
Die Verdrahtung von PC(VSCode), ESP32UnoBoard mit DRV8825-Modulund Limit-/Reference-Switches zeigt das folgendende Schaltbild:
Software
Das Demo-Programm "Esp32StepperMotorDRV8825Switch" steuert den StepperMotorDriver DRV8825in positiver und negativer Richtung an. Ein Richtungswechsel erfolgt nach Betätigung der LimitSwitches:
• SLH in negativer Richtung
• SLL in positiver Richtung
jeweils in feinster (1/32-Schritt-)Auflösung.
Nach dem (automatischen) Verlassen eines Endschalters fährt der Motor mit Halfstep-Resolution weiter.
Im Folgenden der Quell-Code für der Ansteuerung der StepperDriver, die Callbacks der Switches,
die Abarbeitung der MainAction-FiniteStateMachine-States:
• maIdle
• maMovePositive
• maMoveNegative
• maLeaveLimitHigh
• maExitLimitHigh
• maLeaveLimitLow
• maExitLimitLow
#include "Define.h"
//
#include "Switch.h"
#include "StepperDRV8825.h"
//
enum EMainAction
{
maIdle = 0,
maMovePositive = 1,
maMoveNegative = 2,
maLeaveLimitHigh = 3,
maExitLimitHigh = 4,
maLeaveLimitLow = 5,
maExitLimitLow = 6
};
//
EMainAction MainAction = maIdle;
long unsigned MillisPreset;
long int DistancePreset = 0L;
//
CStepperDRV8825 StepperDRV8825(PIN_MOTOR_STEP,
PIN_MOTOR_DIRECTION,
PIN_MOTOR_PRECISIONM0,
PIN_MOTOR_PRECISIONM1,
PIN_MOTOR_PRECISIONM2,
PIN_MOTOR_ENABLEN);
//
void OnSwitchLimitHighChanged(EStateSwitch state);
void OnSwitchReferenceChanged(EStateSwitch state);
void OnSwitchLimitLowChanged(EStateSwitch state);
//
CSwitch SwitchLimitHigh(PIN_SWITCH_LIMITHIGH, false,
OnSwitchLimitHighChanged);
CSwitch SwitchReference(PIN_SWITCH_REFERENCE, false,
OnSwitchReferenceChanged);
CSwitch SwitchLimitLow(PIN_SWITCH_LIMITLOW, false,
OnSwitchLimitLowChanged);
//
//---------------------------------------------------
// Callback - SwitchLimitHigh
//---------------------------------------------------
void OnSwitchLimitHighChanged(EStateSwitch state)
{
switch (state)
{
case sswOff: // LSHigh opened!
SerialPC.println("\r\nSwitchLimitHigh: ..opened..");
if (StepperDRV8825.IsOpened())
{
MainAction = maLeaveLimitHigh;
SerialPC.println(">>>MainAction: LeaveLimitHigh");
SerialPC.println(":::StepperMotor: MoveNegative-LeaveLimitHigh");
StepperDRV8825.Move(sdNegative, srThirtyTwo,
STEPPERIOD_LIMIT_US, STEPCOUNT_FULL);
}
break;
case sswOn:
SerialPC.println("\r\nSwitchLimitHigh: __closed__");
if (maLeaveLimitHigh == MainAction)
{
SerialPC.println(":::StepperMotor: Halt");
StepperDRV8825.Halt();
SerialPC.println(">>>MainAction: ExitLimitHigh");
MainAction = maExitLimitHigh;
}
break;
default: //
SerialPC.println("nc");
break;
}
}
//
//---------------------------------------------------
// Callback - SwitchReference
//---------------------------------------------------
void OnSwitchReferenceChanged(EStateSwitch state)
{
switch (state)
{
case sswOff: // SR opened!
SerialPC.println("\r\nSwitchReference: ..opened..");
if (StepperDRV8825.IsOpened())
{
SerialPC.println("StepScale: *** Negative ***");
}
break;
case sswOn:
SerialPC.println("\r\nSwitchReference: __closed__");
if (StepperDRV8825.IsOpened())
{
SerialPC.println("StepScale: --- Zero Position ---");
StepperDRV8825.SetDistance(0L);
SerialPC.println("StepScale: *** Positive ***");
}
break;
default: //
SerialPC.println("nc");
break;
}
}
//
//---------------------------------------------------
// Callback - SwitchLimitLow
//---------------------------------------------------
void OnSwitchLimitLowChanged(EStateSwitch state)
{
switch (state)
{
case sswOff: // LSLow opened!
SerialPC.println("\r\nSwitchLimitLow: ..opened..");
if (StepperDRV8825.IsOpened())
{
MainAction = maLeaveLimitLow;
SerialPC.println(">>>MainAction: LeaveLimitLow");
SerialPC.println(":::StepperMotor: MovePositive-LeaveLimitLow");
StepperDRV8825.Move(sdPositive, srThirtyTwo,
STEPPERIOD_LIMIT_US, STEPCOUNT_FULL);
}
break;
case sswOn:
SerialPC.println("\r\nSwitchLimitLow: __closed__");
if (maLeaveLimitLow == MainAction)
{
SerialPC.println(":::StepperMotor: Halt");
StepperDRV8825.Halt();
SerialPC.println(">>>MainAction: ExitLimitLow");
MainAction = maExitLimitLow;
}
break;
default: //
SerialPC.println("nc");
break;
}
}
//
//---------------------------------------------------
// Setup
//---------------------------------------------------
void setup()
{
SerialPC.begin(115200);
delay(333);
SerialPC.println("");
SerialPC.println("***************************");
SerialPC.println("* Esp32StepperMotorSwitch *");
SerialPC.println("* Version....: 01V05 *");
SerialPC.println("* DateTime...: 2207221715 *");
SerialPC.println("* Author.....: OMdevelop *");
SerialPC.println("***************************");
//
pinMode(PIN_LEDSYSTEM, OUTPUT);
digitalWrite(PIN_LEDSYSTEM, HIGH);
//
SerialPC.println("Init Switches");
SwitchLimitHigh.Open();
SwitchReference.Open();
SwitchLimitLow.Open();
//
SerialPC.println("Init StepperDRV8825");
StepperDRV8825.Open();
DistancePreset = StepperDRV8825.GetDistance();
//
delay(100);
digitalWrite(PIN_LEDSYSTEM, LOW);
SerialPC.println("Initialisation done");
MainAction = maIdle;
SerialPC.println("MotorState: --- Idle ---");
}
//
//---------------------------------------------------
// MainLoop
//---------------------------------------------------
void loop()
{
SwitchLimitHigh.Execute();
SwitchReference.Execute();
SwitchLimitLow.Execute();
//
StepperDRV8825.Execute();
//
if (DistancePreset != StepperDRV8825.GetDistance())
{
DistancePreset = StepperDRV8825.GetDistance();
SerialPC.printf("\r...Distance: %+7ld", DistancePreset);
}
//
if (ssIdle == StepperDRV8825.GetStateStep())
{
switch (MainAction)
{
case maIdle:
if (MILLIS_IDLE <= (millis() - MillisPreset))
{
MainAction = maMovePositive;
SerialPC.println(">>>MainAction: MovePositive...");
SerialPC.println(":::StepperMotor: MovePositive");
StepperDRV8825.Move(sdPositive, srHalf,//srThirtyTwo,
STEPPERIOD_NORMAL_US, STEPCOUNT_FULL);
}
break;
//----------------------------------------------------------
case maMoveNegative:
break;
case maLeaveLimitLow:
break;
case maExitLimitLow:
MainAction = maMovePositive;
SerialPC.println(">>>MainAction: MovePositive");
SerialPC.println(":::StepperMotor: MovePositive...");
StepperDRV8825.Move(sdPositive, srHalf,//srThirtyTwo,
STEPPERIOD_NORMAL_US, STEPCOUNT_FULL);
break;
//----------------------------------------------------------
case maMovePositive:
break;
case maLeaveLimitHigh:
break;
case maExitLimitHigh:
MainAction = maMoveNegative;
SerialPC.println(">>>MainAction: MoveNegative");
SerialPC.println(":::StepperMotor: MoveNegative...");
StepperDRV8825.Move(sdNegative, srHalf,//srThirtyTwo,
STEPPERIOD_NORMAL_US, STEPCOUNT_FULL);
break;
}
}
}
//
Download des VSCode-Projekts: 2207221715_Esp32StepperMotorDRV8825Switch_01V05.zip
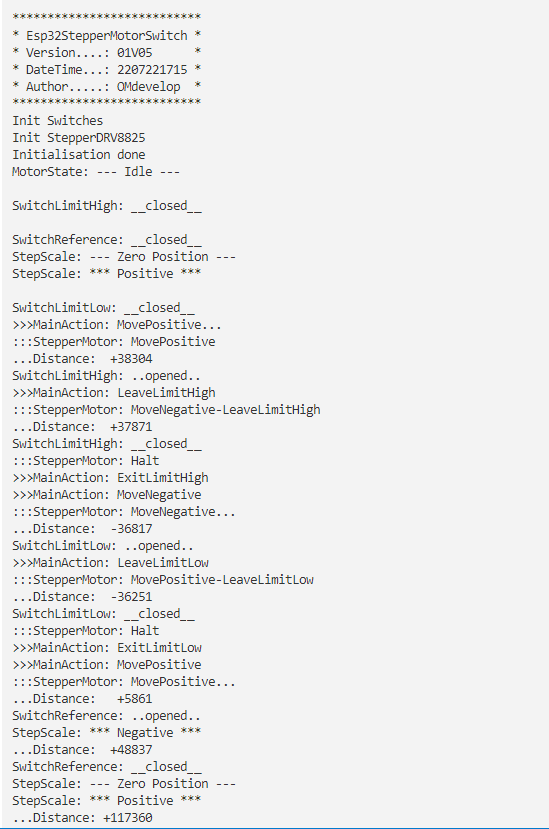
Programm-Terminal-Ausgabe: 2207221715_Esp32StepperMotorDRV8825Switch_01V05
WebSites
Module
Elektronik